




Описание

Рабочее напряжение: 5 В
Количество импульсов: 20
В вращательного кодового можете рассчитывать количество импульсов выход в направлениях вперед и назад, поворот и вращение рассчитывать не похожа на потенциометр. Это количество вращения не ограничено. С помощью клавиши на поворотном кодере вы можете сбросить в исходное состояние, то есть отсчет от 0.
Принцип работы:
Инкрементный энкодер-это поворотный датчик, который преобразует вращающееся смещение в ряд цифровых импульсных сигналов. Эти импульсы используются для контроля углового смещения. Преобразование углового смещения в энкодере Eltra использует принцип фотоэлектрического сканирования. Чтение система основана на вращение радиальные диска индексации (кодовый диск), включающий в себя переменного светильник передачи windows и opacifying windows и облучают по вертикали инфракрасный светильник источник, Товаром и его изображением по таблице размеров, если же проекции на приемник поверхности ресивер покрыт слоем дифракционная решётка, но они имеют такую же ширину окна как кодировщик. Работа приемника заключается в том, чтобы почувствовать изменения, которые возникают при вращении диска, а затем преобразовать светильник в соответствующие электрические изменения. А затем низкого уровня сигнала на более высокий уровень, и производим никаких помех, с квадратным каблуком, пульс, который должен быть использован для того, чтобы справиться с электронных схем. Чтение системы обычно используется дифференциальный режим, который сравнивает два сигнала с одной и той же формы, но с разность фаз-180 ° для того, чтобы улучшить качество и стабильность выходной сигнал. Показания формируются на основе разницы между двумя сигналами, тем самым устраняя помехи.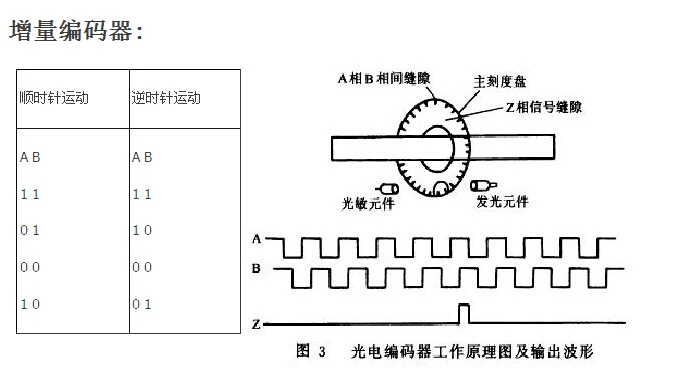
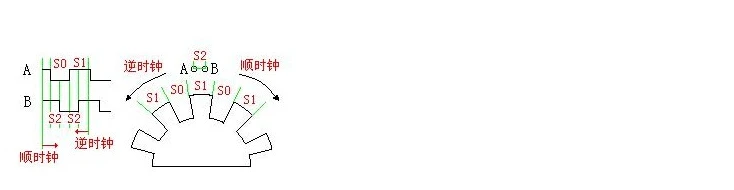
Инкрементный датчик положения:
Incremental кодеры дать двухфазный квадратной формы волны с разность фаз-90 °, как правило, называют a-channel и b-канал. Один из каналов дает информацию о скорости, в то же время, через два канала сигналы для того, чтобы сравнить, получить информацию о направлении вращения. Также имеется специальная название сигнала Z или zero канал, что придает абсолютный ноль кодировщика, который представляет собой прямоугольную волну совпадает с центральной линии канал прямоугольную волну.
Инкрементный датчик положения точность зависит от механических и электрических таких факторов, как решетки индексации ошибка, оптического диска эксцентриситет, эксцентриситет, могут возникать расхождения на представленный электронные устройства для чтения и неточности оптического секции. Единица измерения, которая определяет точность датчика является электрические градусов и кодировщик точностью определяет импульсный отдела кодировщик. Ниже показано вращение механического вала с 360 ° электрической степени, и вращение вала должно быть полным циклом. Для того, чтобы узнать, сколько стоят механический угловой приравнивается к электрической 360 градусов, вы можете использовать следующую формулу для расчета: электрический 360 = машина 360 °/n ° пульс, вывернув наизнанку

Рисунок: A, B коммутационный сигнал
Погрешность индексации кодировщика выражена как максимальное смещение двух последовательных всплесков электрических углов. Ошибка присутствует в любом кодировщике, что вызвано вышеуказанными факторами. Максимальная погрешность энкодера Eltra составляет ± 25 электрический угол (при любом заявленном состоянии), соответствующий номинальному отклонению ± 7%, и максимальное отклонение двух каналов с разницей фаз 90 ° (электрические) ± 35 степень электричества эквивалентна около ± 10% от номинального значения.
UVW сигнала инкрементный датчик положения
В дополнение к обычным кодировщиков, есть некоторые дополнительные кодировщиков, которые интегрированы с других электрических выходных сигналов. В инкрементный датчик положения интегрирован с UVW сигнал является примером, которая широко используется на отзывы от сети переменного тока моторов сервопривода. Эти магнитные полюса сигналы, как правило, выполнены в серводвигатель переменного тока, UVW сигнала, как правило, предназначен имитируя удобный емкостный мини-стилус, служащий также в оригинальная магнитная. В энкодерах Eltra эти сигналы UVW генерируются оптически и проявляются в трех квадратных волнах, которые смещены друг от друга на 120 °. Для того, чтобы облегчить запуск двигателя, управляйте стартером для двигателя нужны эти правильные сигналы. Эти UVW полюс импульсов и могут быть использованы в дальнейшем много раз в механическую ось вращения по мере того как они напрямую зависит от кол-во подключаемых мотор полюса и используются для UVW сигналов 4,6 или более полар-флиса моторы.






 |  |  |  |  |
 |  |  |  |  |
 |  |  |  |  |
 |  |  |  |  |
Характеристики
- Бренд
- sincere&promise
- Состояние
- Новый
- Тип
- Регулятор напряжения
- Номер модели
- Rotary Encoder Module
Сопутствующие товары








